Menuntut ilmu adalah satu keharusan bagi kita kaum muslimin. Banyak sekali dalil yang menunjukkan keutamaan ilmu, para penuntut ilmu dan yang mengajarkannya.
Adab-adab dalam menuntut ilmu yang harus kita ketahui agar ilmu yang kita tuntut berfaidah bagi kita dan orang yang ada di sekitar kita sangatlah banyak. Adab-adab tersebut di antaranya adalah:
1. Ikhlas Karena Allah
Hendaknya niat kita dalam menuntut ilmu adalah kerena Allah I dan untuk negeri akhirat. Apabila seseorang menuntut ilmu hanya untuk mendapatkan gelar agar bisa mendapatkan kedudukan yang tinggi atau ingin menjadi orang yang terpandang atau niat yang sejenisnya, maka Rasulullah telah memberi peringatan tentang hal ini dalam sabdanya:
"Barangsiapa yang menuntut ilmu yang pelajari hanya karena Allah sedang ia tidak menuntutnya kecuali untuk mendapatkan mata-benda dunia, ia tidak akan mendapatkan bau sorga pada hari kiamat".( HR: Ahmad, Abu,Daud dan Ibnu Majah)
Tetapi kalau ada orang yang mengatakan bahwa saya ingin mendapatkan syahadah (MA atau Doktor, misalnya ) bukan karena ingin mendapatkan dunia, tetapi karena sudah menjadi peraturan yang tidak tertulis kalau seseorang yang memiliki pendidikan yang lebih tinggi, segala ucapannya menjadi lebih didengarkan orang dalam menyampaikan ilmu atau dalam mengajar. Niat ini - insya Allah - termasuk niat yang benar.
2. Untuk Menghilangkan Kebodohan Dari Dirinya Dan Orang Lain.
Semua manusia pada mulanya adalah bodoh. Kita berniat untuk meng-hilangkan kebodohan dari diri kita, setelah kita menjadi orang yang memiliki ilmu kita harus mengajarkannya kepada orang lain untuk menghilang kebodohan dari diri mereka, dan tentu saja mengajarkan kepada orang lain itu dengan berbagai cara agar orang lain dapat mengambil faidah dari ilmu kita.
Apakah disyaratkan untuk memberi mamfaat pada orang lain itu kita duduk dimasjid dan mengadakan satu pengajian ataukah kita memberi mamfa'at pada orang lain dengan ilmu itu pada setiap saat? Jawaban yang benar adalah yang kedua; karena Rasulullah e bersabda :
"Sampaikanlah dariku walupun cuma satu ayat (HR: Bukhari)
Imam Ahmad berkata: Ilmu itu tidak ada bandingannya apabila niatnya benar. Para muridnya bertanya: Bagaimanakah yang demikian itu? Beliau menjawab: ia berniat menghilangkan kebodohan dari dirinya dan dari orang lain.
3. Berniat Dalam Menuntut Ilmu Untuk Membela Syari'at
Sudah menjadi keharusan bagi para penuntut ilmu berniat dalam menuntut ilmu untuk membela syari'at. Karena kedudukan syari'at sama dengan pedang kalau tidak ada seseorang yang menggunakannya ia tidak berarti apa-apa. Penuntut ilmu harus membela agamanya dari hal-hal yang menyimpang dari agama (bid'ah), sebagaimana tuntunan yang diajarkan
4. Lapang dada dalam menerima perbedaan pendapat
Apabila ada perbedaan pendapat, hendaknya penuntut ilmu menerima perbedaan itu dengan lapang dada selama perbedaan itu pada persoalaan ijtihad, bukan persoalaan aqidah, karena persoalaan aqidah adalah masalah yang tidak ada perbedaan pendapat di kalangan salaf. Berbeda dalam masalah ijtihad, perbedaan pendapat telah ada sejak zaman shahabat, bahkan pada masa Rasulullah e masih hidup. Karena itu jangan sampai kita menghina atau menjelekkan orang lain yang kebetulan berbeda pandapat dengan kita.
5. Mengamalkan ilmu yang telah didapatkan
Termasuk adab yang tepenting bagi para penuntut ilmu adalah mengamalkan ilmu yang telah diperoleh, karena amal adalah buah dari ilmu, baik itu aqidah, ibadah, akhlak maupun muamalah. Karena orang yang telah memiliki ilmu adalah seperti orang memiliki senjata. Ilmu atau senjata (pedang) tidak akan ada gunanya kecuali diamalkan (digunakan).
6. Menghormati para ulama dan memuliakan mereka
Penuntut ilmu harus selalu lapang dada dalam menerima perbedaan pendapat yang terjadi di kalangan ulama. Jangan sampai ia mengumpat atau mencela ulama yang kebetulan keliru di dalam memutuskan suatu masalah. Mengumpat orang biasa saja sudah termasuk dosa besar apalagi kalau orang itu adalah seorang ulama.
7. Mencari kebenaran dan sabar
Termasuk adab yang paling penting bagi kita sebagai seorang penuntut ilmu adalah mencari kebenaran dari ilmu yang telah didapatkan. Mencari kebenaran dari berita berita yang sampai kepada kita yang menjadi sumber hukum. Ketika sampai kepada kita sebuah hadits misalnya, kita harus meneliti lebih dahulu tentang keshahihan hadits tersebut. Kalau sudah kita temukan bukti bahwa hadits itu adalah shahih, kita berusaha lagi mencari makna (pengertian ) dari hadits tersebut. Dalam mencari kebenaran ini kita harus sabar, jangan tergesa-gasa, jangan cepat merasa bosan atau keluh kesah. Jangan sampai kita mempelajari satu pelajaran setengah-setengah, belajar satu kitab sebentar lalu ganti lagi dengan kitab yang lain. Kalau seperti itu kita tidak akan mendapatkan apa dari yang kita tuntut.
Di samping itu, mencari kebenaran dalam ilmu sangat penting karena sesungguhnya pembawa berita terkadang punya maksud yang tidak benar, atau barangkali dia tidak bermaksud jahat namun dia keliru dalam memahami sebuah dalil.Wallahu 'Alam.
Dikutip dari "Kitabul ilmi" Syaikh Muhammad bin Shalih Al'Utsaimin
. (Abu Luthfi)
 |
Senin, 13 Desember 2010
LCD (Liquid Crystal Display)
LCD merupakan komponen elektronika yang digunakan untuk menampilkan suatu karakter baik itu berupa angka, huruf, simbol atau karakter tertentu sehingga tampilan tersebut dapat dilihat secara visual. Pada rangkaian ini LCD digunakan untuk menampilkan jam dalam penyalaan bel. LCD terdiri dari beberapa pin yang berfungsi untuk pengontrolan pemakaiannya. LCD yang digunakan adalah LCD 16 x 2 atau enam belas karakter dengan dua baris sehingga jumlah maksimum yang ditampilkan enam belas karakter pada tiap baris. LCD tipe TM1632 merupakan suatu jenis tampilan yang menggunakan liquid cristal display dalam menampilkan suatu karakter secara dot matrik 5 x 7 sehingga jenis huruf yang dapat ditampilkan akan lebih banyak dan lebih baik resolusinya jika dibandingkan dengan seven segment. LCD ini memiliki spesifikasi sebagai berikut:
1. LCD ini terdiri dari 32 karakter dengan 2 baris masing-masing 16 karakter dengan display dot matrik 5x7
2. Karakter generator ROM dengan 192 tipe karakter
3. Karakter generator RAM dengan 8 bit karakter
4. 80 x 8 bit display data RAM
5. Dapat diantarmukakan secara langsung dengan pin-pin mikrokontroler ATMega 16
6. Dilengkapi fungsi tambahan; display clear, cursor home, display on-off, cursor on-off, display character blink, cursor shift, dan display shift.
7. Internal Data
8. Reset pada saat power on.
9. Tegangan +5 Volt DC.

1. LCD ini terdiri dari 32 karakter dengan 2 baris masing-masing 16 karakter dengan display dot matrik 5x7
2. Karakter generator ROM dengan 192 tipe karakter
3. Karakter generator RAM dengan 8 bit karakter
4. 80 x 8 bit display data RAM
5. Dapat diantarmukakan secara langsung dengan pin-pin mikrokontroler ATMega 16
6. Dilengkapi fungsi tambahan; display clear, cursor home, display on-off, cursor on-off, display character blink, cursor shift, dan display shift.
7. Internal Data
8. Reset pada saat power on.
9. Tegangan +5 Volt DC.
Bentuk LCD16x2
Mikrokontroler ATMega 16
Mikrokontroler adalah sebuah IC yang digunakan untuk mengontrol sebuah alat atau rangkaian dalam suatu sistem. Mikrokontroler ATMega 16 merupakan keluarga dari AVR (Advanced Versatile RISC atau Alf and Vegard’s Risc prosessor). AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register general-purpose, timer/counter fleksibel dengan mode compare, interrupt internal dan eksternal, serial UART, programmable Watchdog Timer, dan mode power saving, ADC dan PWM internal. AVR juga mempunyai In-System Programmable Flash on-chip yang mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI. ATMega16 mempunyai throughput mendekati 1 MIPS per MHz membuat disainer sistem untuk mengoptimasi konsumsi daya versus kecepatan proses (Heri, 2008:2). Beberapa keistimewaan dari AVR ATMega16 antara lain:
1. Mikrokontroler AVR 8 bit yang memiliki kemampuan tinggi, dengan daya rendah2. Arsitektur RISC dengan throughput mencapai 16 MIPS pada frekuensi 16 MHz
3. Memiliki kapasitas Flash memory 16 KByte, EEPROM 512 Byte dan SRAM 1 Kbyte
4. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C dan D
5. CPU yang terdiri atas 32 buah register
6. Unit interupsi internal dan eksternal
7. Port USART untuk komunikasi serial

Sensor PIR (Passive Infra Red)
PIR adalah sebuah sensor berbasiskan infrared. Akan tetapi, tidak seperti sensor infrared kebanyakan yang terdiri dari IR LED dan fototransistor. PIR tidak memancarkan apapun seperti IR LED. Sesuai dengan namanya ‘Passive’, sensor ini hanya merespon energi dari pancaran sinar inframerah pasif yang dimiliki oleh setiap benda yang terdeteksi olehnya. Benda yang bisa dideteksi oleh sensor ini biasanya adalah tubuh manusia. Di dalam sensor PIR ini terdapat bagian-bagian yang mempunyai perannya masing-masing, yaitu Fresnel Lens, IR Filter, Pyroelectric sensor, amplifier, dan comparator.

Gambar Sensor PIR
Pyroelectric adalah kemampuan bahan tertentu untuk menghasilkan potensial listrik sementara ketika dipanaskan atau didinginkan. Perubahan suhu sedikit mengubah posisi atom dalam struktur kristal, sehingga polarisasi merubah material. Perubahan polarisasi menimbulkan potensi listrik sementara, meskipun ini menghilang setelah waktu relaksasi dielektrik.
Sensor PIR ini bekerja dengan menangkap energi panas yang dihasilkan dari pancaran sinar inframerah pasif yang dimiliki setiap benda dengan suhu benda diatas nol mutlak. Seperti tubuh manusia yang memiliki suhu tubuh kira-kira 37 derajat celcius, yang merupakan suhu panas yang khas yang terdapat pada lingkungan.
Pancaran sinar inframerah inilah yang kemudian ditangkap oleh Pyroelectric sensor yang merupakan inti dari sensor PIR ini sehingga menyebabkan Pyroelectic sensor yang terdiri dari galium nitrida, caesium nitrat dan litium tantalate menghasilkan arus listrik, karena pancaran sinar inframerah pasif ini membawa energi panas. Prosesnya hampir sama seperti arus listrik yang terbentuk ketika sinar matahari mengenai solar cell.

Sensor PIR hanya bereaksi pada tubuh manusia saja, hal ini disebabkan karena adanya IR Filter yang menyaring panjang gelombang sinar inframerah pasif. IR Filter dimodul sensor PIR ini mampu menyaring panjang gelombang sinar inframerah pasif antara 8-14 mikrometer, sehingga panjang gelombang yang dihasilkan dari tubuh manusia yang berkisar antara 9-10 mikrometer yang dapat dideteksi oleh sensor.
Jadi, ketika seseorang berjalan melewati sensor, sensor akan menangkap pancaran sinar inframerah pasif yang dipancarkan oleh tubuh manusia yang memiliki suhu yang berbeda dari lingkungan sehingga menyebabkan material pyroelectric bereaksi menghasilkan arus listrik karena adanya energi panas yang dibawa oleh sinar inframerah pasif tersebut. Kemudian sebuah sirkuit amplifier yang ada menguatkan arus tersebut yang kemudian dibandingkan oleh komparator sehingga menghasilkan output.
Ketika manusia berada di depan sensor PIR dengan kondisi diam, maka sensor PIR akan menghitung panjang gelombang yang dihasilkan oleh tubuh manusia tersebut. Panjang gelombang yang konstan ini menyebabkan energi panas yang dihasilkan dapat digambarkan hampir sama pada kondisi lingkungan di sekitarnya.
Ketika manusia itu melakukan gerakan, maka tubuh manusia itu akan menghasilkan pancaran sinar inframerah pasif dengan panjang gelombang yang bervariasi sehingga menghasilkan panas berbeda yang menyebabkan sensor merespon dengan cara menghasilkan arus pada material pyroelectricnya dengan besaran yang berbeda-beda. Karena besaran yang berbeda inilah comparator menghasilkan output.
Jadi, sensor PIR tidak akan menghasilkan output apabila sensor ini dihadapkan dengan benda panas yang tidak memiliki panjang gelombang inframerah antar 8 sampai 14 mikrometer dan benda yang diam seperti sinar lampu yang sangat terang yang mampu menghasilkan panas, pantulan objek benda dari cermin dan suhu panas ketika musim panas.
Gambar Sensor PIR
(Sumber: COMedia Ltd, 1996)
Fresnel lens adalah sejenis lensa. Lensa Fresnel biasanya terbuat dari kaca atau plastik, ukurannya bervariasi dari besar (mercusuar sejarah tua, ukuran meter) dan menengah (bantuan buku bacaan, proyektor OHP viewgraph) ke kecil (layar kamera SLR, mikro-optik). Dalam banyak kasus mereka sangat tipis dan datar, nyaris fleksibel, dengan ketebalan pada kisaran 3-5 milimeter. Pyroelectric adalah kemampuan bahan tertentu untuk menghasilkan potensial listrik sementara ketika dipanaskan atau didinginkan. Perubahan suhu sedikit mengubah posisi atom dalam struktur kristal, sehingga polarisasi merubah material. Perubahan polarisasi menimbulkan potensi listrik sementara, meskipun ini menghilang setelah waktu relaksasi dielektrik.
Sensor PIR ini bekerja dengan menangkap energi panas yang dihasilkan dari pancaran sinar inframerah pasif yang dimiliki setiap benda dengan suhu benda diatas nol mutlak. Seperti tubuh manusia yang memiliki suhu tubuh kira-kira 37 derajat celcius, yang merupakan suhu panas yang khas yang terdapat pada lingkungan.
Pancaran sinar inframerah inilah yang kemudian ditangkap oleh Pyroelectric sensor yang merupakan inti dari sensor PIR ini sehingga menyebabkan Pyroelectic sensor yang terdiri dari galium nitrida, caesium nitrat dan litium tantalate menghasilkan arus listrik, karena pancaran sinar inframerah pasif ini membawa energi panas. Prosesnya hampir sama seperti arus listrik yang terbentuk ketika sinar matahari mengenai solar cell.
Gambar Prinsip kerja PIR
(Sumber: rifqyalistia, 2008)
Sensor PIR hanya bereaksi pada tubuh manusia saja, hal ini disebabkan karena adanya IR Filter yang menyaring panjang gelombang sinar inframerah pasif. IR Filter dimodul sensor PIR ini mampu menyaring panjang gelombang sinar inframerah pasif antara 8-14 mikrometer, sehingga panjang gelombang yang dihasilkan dari tubuh manusia yang berkisar antara 9-10 mikrometer yang dapat dideteksi oleh sensor.
Jadi, ketika seseorang berjalan melewati sensor, sensor akan menangkap pancaran sinar inframerah pasif yang dipancarkan oleh tubuh manusia yang memiliki suhu yang berbeda dari lingkungan sehingga menyebabkan material pyroelectric bereaksi menghasilkan arus listrik karena adanya energi panas yang dibawa oleh sinar inframerah pasif tersebut. Kemudian sebuah sirkuit amplifier yang ada menguatkan arus tersebut yang kemudian dibandingkan oleh komparator sehingga menghasilkan output.
Ketika manusia berada di depan sensor PIR dengan kondisi diam, maka sensor PIR akan menghitung panjang gelombang yang dihasilkan oleh tubuh manusia tersebut. Panjang gelombang yang konstan ini menyebabkan energi panas yang dihasilkan dapat digambarkan hampir sama pada kondisi lingkungan di sekitarnya.
Ketika manusia itu melakukan gerakan, maka tubuh manusia itu akan menghasilkan pancaran sinar inframerah pasif dengan panjang gelombang yang bervariasi sehingga menghasilkan panas berbeda yang menyebabkan sensor merespon dengan cara menghasilkan arus pada material pyroelectricnya dengan besaran yang berbeda-beda. Karena besaran yang berbeda inilah comparator menghasilkan output.
Jadi, sensor PIR tidak akan menghasilkan output apabila sensor ini dihadapkan dengan benda panas yang tidak memiliki panjang gelombang inframerah antar 8 sampai 14 mikrometer dan benda yang diam seperti sinar lampu yang sangat terang yang mampu menghasilkan panas, pantulan objek benda dari cermin dan suhu panas ketika musim panas.
Minggu, 12 Desember 2010
Sensor Suhu LM35
Sensor suhu LM35 adalah komponen elektronika yang memiliki fungsi untuk mengubah besaran suhu menjadi besaran listrik dalam bentuk tegangan. Sensor Suhu LM35 yang dipakai dalam penelitian ini berupa komponen elektronika elektronika yang diproduksi oleh National Semiconductor. LM35 memiliki keakuratan tinggi dan kemudahan perancangan jika dibandingkan dengan sensor suhu yang lain, LM35 juga mempunyai keluaran impedansi yang rendah dan linieritas yang tinggi sehingga dapat dengan mudah dihubungkan dengan rangkaian kendali khusus serta tidak memerlukan penyetelan lanjutan.
Meskipun tegangan sensor ini dapat mencapai 30 volt akan tetapi yang diberikan kesensor adalah sebesar 5 volt, sehingga dapat digunakan dengan catu daya tunggal dengan ketentuan bahwa LM35 hanya membutuhkan arus sebesar 60 µA hal ini berarti LM35 mempunyai kemampuan menghasilkan panas (self-heating) dari sensor yang dapat menyebabkan kesalahan pembacaan yang rendah yaitu kurang dari 0,5 ºC pada suhu 25 ºC .
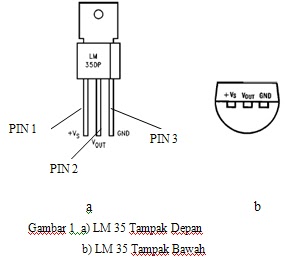 Gambar diatas menunjukan bentuk dari LM35 tampak depan dan tampak bawah. 3 pin LM35 menujukan fungsi masing-masing pin diantaranya, pin 1 berfungsi sebagai sumber tegangan kerja dari LM35, pin 2 atau tengah digunakan sebagai tegangan keluaran atau Vout dengan jangkauan kerja dari 0 Volt sampai dengan 1,5 Volt dengan tegangan operasi sensor LM35 yang dapat digunakan antar 4 Volt sampai 30 Volt. Keluaran sensor ini akan naik sebesar 10 mV setiap derajad celcius sehingga diperoleh persamaan sebagai berikut :
Gambar diatas menunjukan bentuk dari LM35 tampak depan dan tampak bawah. 3 pin LM35 menujukan fungsi masing-masing pin diantaranya, pin 1 berfungsi sebagai sumber tegangan kerja dari LM35, pin 2 atau tengah digunakan sebagai tegangan keluaran atau Vout dengan jangkauan kerja dari 0 Volt sampai dengan 1,5 Volt dengan tegangan operasi sensor LM35 yang dapat digunakan antar 4 Volt sampai 30 Volt. Keluaran sensor ini akan naik sebesar 10 mV setiap derajad celcius sehingga diperoleh persamaan sebagai berikut :
VLM35 = Suhu* 10 mV
Secara prinsip sensor akan melakukan penginderaan pada saat perubahan suhu setiap suhu 1 ºC akan menunjukan tegangan sebesar 10 mV. Pada penempatannya LM35 dapat ditempelkan dengan perekat atau dapat pula disemen pada permukaan akan tetapi suhunya akan sedikit berkurang sekitar 0,01 ºC karena terserap pada suhu permukaan tersebut. Dengan cara seperti ini diharapkan selisih antara suhu udara dan suhu permukaan dapat dideteksi oleh sensor LM35 sama dengan suhu disekitarnya, jika suhu udara disekitarnya jauh lebih tinggi atau jauh lebih rendah dari suhu permukaan, maka LM35 berada pada suhu permukaan dan suhu udara disekitarnya .
Jarak yang jauh diperlukan penghubung yang tidak terpengaruh oleh interferensi dari luar, dengan demikian digunakan kabel selubung yang ditanahkan sehingga dapat bertindak sebagai suatu antenna penerima dan simpangan didalamnya, juga dapat bertindak sebagai perata arus yang mengkoreksi pada kasus yang sedemikian, dengan mengunakan metode bypass kapasitor dari Vin untuk ditanahkan. Berikut ini adalah karakteristik dari sensor LM35.
1. Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
2. Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada suhu 25 ºC seperti terlihat pada gambar 2.2.
3. Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC.
4. Bekerja pada tegangan 4 sampai 30 volt.
5. Memiliki arus rendah yaitu kurang dari 60 µA.
6. Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam.
7. Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA.
8. Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
{kind=link}
Meskipun tegangan sensor ini dapat mencapai 30 volt akan tetapi yang diberikan kesensor adalah sebesar 5 volt, sehingga dapat digunakan dengan catu daya tunggal dengan ketentuan bahwa LM35 hanya membutuhkan arus sebesar 60 µA hal ini berarti LM35 mempunyai kemampuan menghasilkan panas (self-heating) dari sensor yang dapat menyebabkan kesalahan pembacaan yang rendah yaitu kurang dari 0,5 ºC pada suhu 25 ºC .
VLM35 = Suhu* 10 mV
Secara prinsip sensor akan melakukan penginderaan pada saat perubahan suhu setiap suhu 1 ºC akan menunjukan tegangan sebesar 10 mV. Pada penempatannya LM35 dapat ditempelkan dengan perekat atau dapat pula disemen pada permukaan akan tetapi suhunya akan sedikit berkurang sekitar 0,01 ºC karena terserap pada suhu permukaan tersebut. Dengan cara seperti ini diharapkan selisih antara suhu udara dan suhu permukaan dapat dideteksi oleh sensor LM35 sama dengan suhu disekitarnya, jika suhu udara disekitarnya jauh lebih tinggi atau jauh lebih rendah dari suhu permukaan, maka LM35 berada pada suhu permukaan dan suhu udara disekitarnya .
Jarak yang jauh diperlukan penghubung yang tidak terpengaruh oleh interferensi dari luar, dengan demikian digunakan kabel selubung yang ditanahkan sehingga dapat bertindak sebagai suatu antenna penerima dan simpangan didalamnya, juga dapat bertindak sebagai perata arus yang mengkoreksi pada kasus yang sedemikian, dengan mengunakan metode bypass kapasitor dari Vin untuk ditanahkan. Berikut ini adalah karakteristik dari sensor LM35.
1. Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
2. Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada suhu 25 ºC seperti terlihat pada gambar 2.2.
3. Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC.
4. Bekerja pada tegangan 4 sampai 30 volt.
5. Memiliki arus rendah yaitu kurang dari 60 µA.
6. Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam.
7. Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA.
8. Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
Sejarah Perkembangan Teknologi Robot
Dalam kehidupan masyarakat modern, istilah robot sudah terasa begitu akrab. Meskipun kehadirannya mungkin masih jarang dijumpai di banyak tempat. Tapi setidaknya akan segera paham jika disebutkan tentang robot. Sementara, bagi kebanyakan orang, robot seringkali diartikan sebagai mesin berbentuk manusia yang bisa melakukan gerakan atau tindakan seperti manusia. Ini merupakan imej yang ditimbulkan oleh kebanyakan film bergenre science fiction.
Lalu definisi robot itu sendiri bagaimana? Menurut situs inventors.about.com robot adalah merupakan perangkat otomatis yang menyelenggarakan fungsi yang biasanya dianggap berasal dari manusia atau sebuah mesin yang berbentuk manusia. Mungkin sebuah definisi yang kurang tepat karena ada beberapa robot yang tidak berbentuk menyerupai manusia atau bagian dari organ manusia maupun menggantikan pekerjaan-pekerjaan yang semula dilakukan oleh manusia meskipun sebagian besar tujuan penciptaan robot adalah untuk itu. Karena kenyataannya robot-robot yang telah berhasil dibuat dan kemudian menjadi terkenal, justru bukan robot yang menyerupai bentuk tubuh atau bagian organ manusia. Misalnya robot anjing AIBO ERS-210 yang dibuat oleh perusahaan SONY.
Berawal dari sebuah cerpen
Sejak kapan manusia mengenal robot? Konon kabarnya, istilah robot pertama kali dipopulerkan dalam sebuah cerita pendek (cerpen) yang berjudul Runaround, ditulis oleh Isaac Asimov pada tahun 1942. Sebenarnya istilah robot sudah digunakan oleh Karel Capek, seorang penulis drama dari Cekoslovakia. Cerpen itu bercerita tentang robot therapy. Terinspirasi pada cerpen Runaround, Joseph Weizenbaum, seorang profesor di Institut Massachusetts, membuat program Eliza pada tahun 1966. Ada sekitar 240 baris kode yang dibuat oleh Weizenbaum untuk mensimulasikan sebuah psikotherapy.
Ternyata bukan hanya Prof. Weizenbaum saja yang terobsesi dengan cerpen Runaround hasil karya Asimov itu. Sepuluh tahun sebelum Prof. Weizenbaum membuat program Elilza, George Devol dan Joseph Engelberger sudah lebih dulu membahas tentang pembuatan robot berdasarkan ide cerita dari cerpen Runaround tersebut. Mereka berdua selanjutnya mendirikan perusahaan yang diberi nama Unimation, singkatan dari istilah Universal Automation. Unimation menjadi perusahaan pertama di dunia yang menghasilkan robot secara komersial. Bahkan kabarnya perusahaan ini sampai sekarang masih terus berproduksi.
Periode Teknologi Robot
Meskipun ada sebagian yang mungkin tidak bisa didefinisikan sebagai robot, tapi hasil-hasil pencipataan yang disusun berdasarkan urutan kurun waktu dibawah ini dianggap sebagai perkembangan dari cikal bakal teknologi robot.
1. Tahun 270 sebelem masehi, Ctesibus, pada jaman Yunani kuno telah membuat organ-organ dan jam air yang dapat membuat gerakan-gerakan tertentu.
2. Tahun 1818, Mary Shelley menulis novel "Frankenstein" yang terkenal dan menyeramkan itu. Cerita tentang manusia yang diciptakan oleh Dr Frankenstein.
3. Tahun 1921, Istilah "robot" pertama kali digunakan dalam sebuah drama berjudul "RUR" atau "Rossum's Universal Robot" yang ditulis oleh penulis dari Ceko, Karel Capek. Secara sederhana drama ini mengkisahkan tentang manusia yang membuat robot dan pada akhirnya robot itu membunuh manusia yang membuatnya.
4. Tahun 1941, penulis fiksi ilmiah Isaac Asimov pertama kali menggunakan kata "robot" untuk menggambarkan teknologi robot dan meramalkan munculnya robot industri yang kuat.
5. Tahun 1942, Asimov menulis "Runaround", cerita tentang robot dan memperkenal "Tiga Hukum Robot".
6. Tahun 1948, Cybernetics", sebuah hasil tulisan tentang pengaruh pada kecerdasan buatan yang diterbitkan oleh Norbert Wiener. Pada masa itu juga seorang perintis teknologi robot di Inggris, William Grey Walter menciptakan robot sederhana yang diberi nama Elmer dan Elsie yang meniru perilaku manusia hidup dengan menggunakan elektronik.
7. George Devol dan Joseph Engleberger menciptakan robot lengan yang diprogram untuk pertama kalinya dan menciptakan istilah Universal Otomasi untuk pertama kalinya juga.
8. Tahun 1956, George Devol dan Joseph Engelberger membentuk perusahaan penghasil robot pertama di dunia. Pada tahun ini juga sebuah robot elektronik berbentuk tupai dan diberi nama Squee diciptakan.
9. Tahun 1959, Computer Assisted Manufacturingg telah didemonstrasikan di Laboratorium Servomechanisms di MIT.
10. Tahun 1961, robot industri pertama diperagakan di pabrik mobil General Motors di New Jersey. Robot itu dinamakan UNIMATE.
11. Tahun 1963, robot lengan buatan yang dikontrol oleh computer pertama kali dirancang. Lengan (tangan) robot ini dirancang sebagai alat bagi penyandang cacat dengan kelengkapan enam sendi yang memberikan fleksibilitas lengan manusia.
12. Tahun 1965, pembuatan system canggih yang pertama dan disebut DENDRAL. Program ini dirancang untuk melaksanakan akumulasi pengetahuan dari subjek ahli.
13. Tahun 1968, Marvin Minsky membuat lengan tentakel yang dinamakan Octopus.
14. Tahun 1969, pembuatan lengan Stanford yang digerakkan oleh tenaga listrik. Lengan robot ini dikendalikan oleh komputer.
15. Tahun 1970, kemunculan robot Shakey yang disebut-sebut sebagai mobile robot yang pertama yang dikendalikan oleh kecerdasan buatan. Robot ini dibuat oleh SRI International.
16. Tahun 1974, perancangan lengan robot yang bekerja berdasarkan umpan balik dan sensor tekanan. Robot yang disebut dengan nama Silver Arm ini digunakan untuk perakitan komponen-komponen di bidang industry.
17. Tahun 1979, pertama kalinya didemonstrasikan kemampuan sebuah robot yang berlalu lalang di dalam sebuah ruangan yang penuh dengan kursi. Robot yang diberi nama Stanford ini dapat menghindari menabrak kursi-kursi yang diletakkan secara acak di ruangan tersebut. Robot ini dilengkapi dengan kamera yang menyampaikan gambar medan laluan ke komputer. Selanjutnya komputer memperhitungkan jarak benda dan hambatan yang ada pada medan.
Pada kurun waktu berikutnya penciptaan robot sudah bisa didapatkan melalui informasi yang banyak dipublikasikan oleh media massa. Silahkan Anda mencari informasi tersebut melalui media elektronik atau media cetak.
inventors.about.com
Lalu definisi robot itu sendiri bagaimana? Menurut situs inventors.about.com robot adalah merupakan perangkat otomatis yang menyelenggarakan fungsi yang biasanya dianggap berasal dari manusia atau sebuah mesin yang berbentuk manusia. Mungkin sebuah definisi yang kurang tepat karena ada beberapa robot yang tidak berbentuk menyerupai manusia atau bagian dari organ manusia maupun menggantikan pekerjaan-pekerjaan yang semula dilakukan oleh manusia meskipun sebagian besar tujuan penciptaan robot adalah untuk itu. Karena kenyataannya robot-robot yang telah berhasil dibuat dan kemudian menjadi terkenal, justru bukan robot yang menyerupai bentuk tubuh atau bagian organ manusia. Misalnya robot anjing AIBO ERS-210 yang dibuat oleh perusahaan SONY.
Berawal dari sebuah cerpen
Sejak kapan manusia mengenal robot? Konon kabarnya, istilah robot pertama kali dipopulerkan dalam sebuah cerita pendek (cerpen) yang berjudul Runaround, ditulis oleh Isaac Asimov pada tahun 1942. Sebenarnya istilah robot sudah digunakan oleh Karel Capek, seorang penulis drama dari Cekoslovakia. Cerpen itu bercerita tentang robot therapy. Terinspirasi pada cerpen Runaround, Joseph Weizenbaum, seorang profesor di Institut Massachusetts, membuat program Eliza pada tahun 1966. Ada sekitar 240 baris kode yang dibuat oleh Weizenbaum untuk mensimulasikan sebuah psikotherapy.
Ternyata bukan hanya Prof. Weizenbaum saja yang terobsesi dengan cerpen Runaround hasil karya Asimov itu. Sepuluh tahun sebelum Prof. Weizenbaum membuat program Elilza, George Devol dan Joseph Engelberger sudah lebih dulu membahas tentang pembuatan robot berdasarkan ide cerita dari cerpen Runaround tersebut. Mereka berdua selanjutnya mendirikan perusahaan yang diberi nama Unimation, singkatan dari istilah Universal Automation. Unimation menjadi perusahaan pertama di dunia yang menghasilkan robot secara komersial. Bahkan kabarnya perusahaan ini sampai sekarang masih terus berproduksi.
Periode Teknologi Robot
Meskipun ada sebagian yang mungkin tidak bisa didefinisikan sebagai robot, tapi hasil-hasil pencipataan yang disusun berdasarkan urutan kurun waktu dibawah ini dianggap sebagai perkembangan dari cikal bakal teknologi robot.
1. Tahun 270 sebelem masehi, Ctesibus, pada jaman Yunani kuno telah membuat organ-organ dan jam air yang dapat membuat gerakan-gerakan tertentu.
2. Tahun 1818, Mary Shelley menulis novel "Frankenstein" yang terkenal dan menyeramkan itu. Cerita tentang manusia yang diciptakan oleh Dr Frankenstein.
3. Tahun 1921, Istilah "robot" pertama kali digunakan dalam sebuah drama berjudul "RUR" atau "Rossum's Universal Robot" yang ditulis oleh penulis dari Ceko, Karel Capek. Secara sederhana drama ini mengkisahkan tentang manusia yang membuat robot dan pada akhirnya robot itu membunuh manusia yang membuatnya.
4. Tahun 1941, penulis fiksi ilmiah Isaac Asimov pertama kali menggunakan kata "robot" untuk menggambarkan teknologi robot dan meramalkan munculnya robot industri yang kuat.
5. Tahun 1942, Asimov menulis "Runaround", cerita tentang robot dan memperkenal "Tiga Hukum Robot".
6. Tahun 1948, Cybernetics", sebuah hasil tulisan tentang pengaruh pada kecerdasan buatan yang diterbitkan oleh Norbert Wiener. Pada masa itu juga seorang perintis teknologi robot di Inggris, William Grey Walter menciptakan robot sederhana yang diberi nama Elmer dan Elsie yang meniru perilaku manusia hidup dengan menggunakan elektronik.
7. George Devol dan Joseph Engleberger menciptakan robot lengan yang diprogram untuk pertama kalinya dan menciptakan istilah Universal Otomasi untuk pertama kalinya juga.
8. Tahun 1956, George Devol dan Joseph Engelberger membentuk perusahaan penghasil robot pertama di dunia. Pada tahun ini juga sebuah robot elektronik berbentuk tupai dan diberi nama Squee diciptakan.
9. Tahun 1959, Computer Assisted Manufacturingg telah didemonstrasikan di Laboratorium Servomechanisms di MIT.
10. Tahun 1961, robot industri pertama diperagakan di pabrik mobil General Motors di New Jersey. Robot itu dinamakan UNIMATE.
11. Tahun 1963, robot lengan buatan yang dikontrol oleh computer pertama kali dirancang. Lengan (tangan) robot ini dirancang sebagai alat bagi penyandang cacat dengan kelengkapan enam sendi yang memberikan fleksibilitas lengan manusia.
12. Tahun 1965, pembuatan system canggih yang pertama dan disebut DENDRAL. Program ini dirancang untuk melaksanakan akumulasi pengetahuan dari subjek ahli.
13. Tahun 1968, Marvin Minsky membuat lengan tentakel yang dinamakan Octopus.
14. Tahun 1969, pembuatan lengan Stanford yang digerakkan oleh tenaga listrik. Lengan robot ini dikendalikan oleh komputer.
15. Tahun 1970, kemunculan robot Shakey yang disebut-sebut sebagai mobile robot yang pertama yang dikendalikan oleh kecerdasan buatan. Robot ini dibuat oleh SRI International.
16. Tahun 1974, perancangan lengan robot yang bekerja berdasarkan umpan balik dan sensor tekanan. Robot yang disebut dengan nama Silver Arm ini digunakan untuk perakitan komponen-komponen di bidang industry.
17. Tahun 1979, pertama kalinya didemonstrasikan kemampuan sebuah robot yang berlalu lalang di dalam sebuah ruangan yang penuh dengan kursi. Robot yang diberi nama Stanford ini dapat menghindari menabrak kursi-kursi yang diletakkan secara acak di ruangan tersebut. Robot ini dilengkapi dengan kamera yang menyampaikan gambar medan laluan ke komputer. Selanjutnya komputer memperhitungkan jarak benda dan hambatan yang ada pada medan.
Pada kurun waktu berikutnya penciptaan robot sudah bisa didapatkan melalui informasi yang banyak dipublikasikan oleh media massa. Silahkan Anda mencari informasi tersebut melalui media elektronik atau media cetak.
inventors.about.com
MERENGKUH CINTA DALAM BUAIAN PENA
Ya, ALLAH,
Aku berdoa untuk seorang wanita, yang akan menjadi bagian dari hidupku.
Seorang yang sungguh mencintaiMU lebih dari segala sesuatu.
Seorang wanita yang akan meletakkanku pada posisi kedua di hatinyasetelah Engkau.
Seorang wanita yang hidup bukan untuk dirinya sendiri tetapi untukMU.
Seseorang yang memiliki hati yang bijak bukan hanya otak yang cerdas.
Seorang wanita yang tidak hanya mencintaiku tetapi juga menghormati aku.
Seorang wanita yang tidak hanya memujaku tetapi dapat juga menasehati ketika aku berbuat salah.
Seorang yang mencintaiku bukan karena ketampananku tetapi karena hatiku.
Seorang wanita yang dapat menjadi sahabat terbaikku dalam tiap waktu dan situasi.
Seseorang yang dapat membuatku merasa sebagai seorang pria ketika berada disebelahnya.
Aku tidak meminta seorang yang sempurna,
Namun aku meminta seorang yang tidak sempurna, sehingga aku dapat membuatnya sempurna dimataMU.
Seorang wanita yang membutuhkan dukunganku sebagai peneguhnya.
Seorang wanita yang membutuhkan doaku untuk kehidupannya.
Seseorang yang membutuhkan senyumanku untuk mengatasi kesedihannya.
Seseorang yang membutuhkan diriku untuk membuat hidupnya menjadi sempurna.
Dan aku juga meminta:
Jadikanlah aku menjadi seorang pria yang dapat membuat wanita itu bangga.
Berikan aku sebuah hati yang sungguh mencintaiMU, sehingga aku dapat mencintainya dengan cintaMU, bukan mencintainya dengan sekedar cintaku.
Berikanlah SifatMU yang lembut sehingga ketampananku datang dariMU bukan dari luar diriku.
Berilah aku tanganMU sehingga aku selalu mampu berdoa untuknya.
Berikanlah aku penglihatanMU sehingga aku dapat melihat banyak hal baik dalam dirinya dan bukan hal buruk saja.
Berikan aku mulutMU yang penuh dengan kata-kata kebijaksanaanMUdan pemberi semangat, sehingga aku dapat mendukungnya setiap hari, dan aku dapat tersenyum padanya setiap pagi.
Dan bilamana akhirnya kami akan bertemu, aku berharap kami berdua dapat mengatakaan "betapa besarnya Tuhan itu karena Engkau telah memberikan kepadaku seseorang yang dapat membuat hidupku menjadi sempurna".
Aku mengetahui bahwa Engkau menginginkan kami bertemu pada waktu yang
tepat dan Engkau akan membuat segala sesuatunya indah pada waktu yang
Kautentukan.
Abu Aufa *
(* Penulis buku Diari Kehidupan 2, telah diterbitkan oleh PT Syaamil Cipta Media, Bandung, 2004, Catatan: Tulisan ini adalah hasil editing dari tulisan lamanya Abu Aufa yang berjudul Usah Kau Lara Sendiri.
Aku berdoa untuk seorang wanita, yang akan menjadi bagian dari hidupku.
Seorang yang sungguh mencintaiMU lebih dari segala sesuatu.
Seorang wanita yang akan meletakkanku pada posisi kedua di hatinyasetelah Engkau.
Seorang wanita yang hidup bukan untuk dirinya sendiri tetapi untukMU.
Seseorang yang memiliki hati yang bijak bukan hanya otak yang cerdas.
Seorang wanita yang tidak hanya mencintaiku tetapi juga menghormati aku.
Seorang wanita yang tidak hanya memujaku tetapi dapat juga menasehati ketika aku berbuat salah.
Seorang yang mencintaiku bukan karena ketampananku tetapi karena hatiku.
Seorang wanita yang dapat menjadi sahabat terbaikku dalam tiap waktu dan situasi.
Seseorang yang dapat membuatku merasa sebagai seorang pria ketika berada disebelahnya.
Aku tidak meminta seorang yang sempurna,
Namun aku meminta seorang yang tidak sempurna, sehingga aku dapat membuatnya sempurna dimataMU.
Seorang wanita yang membutuhkan dukunganku sebagai peneguhnya.
Seorang wanita yang membutuhkan doaku untuk kehidupannya.
Seseorang yang membutuhkan senyumanku untuk mengatasi kesedihannya.
Seseorang yang membutuhkan diriku untuk membuat hidupnya menjadi sempurna.
Dan aku juga meminta:
Jadikanlah aku menjadi seorang pria yang dapat membuat wanita itu bangga.
Berikan aku sebuah hati yang sungguh mencintaiMU, sehingga aku dapat mencintainya dengan cintaMU, bukan mencintainya dengan sekedar cintaku.
Berikanlah SifatMU yang lembut sehingga ketampananku datang dariMU bukan dari luar diriku.
Berilah aku tanganMU sehingga aku selalu mampu berdoa untuknya.
Berikanlah aku penglihatanMU sehingga aku dapat melihat banyak hal baik dalam dirinya dan bukan hal buruk saja.
Berikan aku mulutMU yang penuh dengan kata-kata kebijaksanaanMUdan pemberi semangat, sehingga aku dapat mendukungnya setiap hari, dan aku dapat tersenyum padanya setiap pagi.
Dan bilamana akhirnya kami akan bertemu, aku berharap kami berdua dapat mengatakaan "betapa besarnya Tuhan itu karena Engkau telah memberikan kepadaku seseorang yang dapat membuat hidupku menjadi sempurna".
Aku mengetahui bahwa Engkau menginginkan kami bertemu pada waktu yang
tepat dan Engkau akan membuat segala sesuatunya indah pada waktu yang
Kautentukan.
Abu Aufa *
(* Penulis buku Diari Kehidupan 2, telah diterbitkan oleh PT Syaamil Cipta Media, Bandung, 2004, Catatan: Tulisan ini adalah hasil editing dari tulisan lamanya Abu Aufa yang berjudul Usah Kau Lara Sendiri.
Kamis, 09 Desember 2010
Final Project
ABSTRAK
Safi’i, Achmad. 2010. Otomatisasi Penyalaan Lampu dan Bel Pada Industri Rokok Berbasis Mikrokontroler. Tugas Akhir, Jurusan Teknik Elektro Fakultas Teknik Universitas Negeri Malang. Pembimbing: (I) Drs. Puger Honggowiyono, M.T. dan (II) I Made Wirawan, S.T., S.S.T.,
Kata kunci: otomatisasi, penyalaan, lampu dan bel, industri
Industri adalah suatu tempat yang digunakan oleh perusahaan untuk memproduksi barang. Salah satu faktor penting dari lingkungan industri adalah dapat memberikan kenyamanan kepada pegawai dalam beraktivitas. Untuk itu dapat diatasi dengan adanya sistem penerangan yang baik. ”Penerangan yang baik dalam suatu pabrik atau perusahaan akan membantu terciptanya suatu tempat kerja yang aman dan nyaman, sehingga dalam melaksanakan kegiatan produksi dapat menghemat penglihatan, tenaga, serta memberikan semangat kerja yang tinggi pada pegawai” (Rawan, 2009).
Tujuan pembuatan Tugas Akhir ini untuk menciptakan suatu sistem otomatisasi penyalaan lampu dan bel untuk menggantikan sistem manual pada industri rokok sehingga dengan adanya alat ini membantu pekerja dan perusahaan agar lebih efektif dan efisien dalam melakukan kegiatan produksi.
Metode perancangan meliputi: (1) perancangan perangkat keras (hardware) meliputi rangkaian sensor cahaya, sensor PIR, rangkaian minimum sistem, dan rangkaian driver, (2) perancangan perangkat lunak (software), (3) perancangan mekanik.
Hasil yang didapat adalah penyalaan lampu berdasarkan intensitas cahaya dan aktivitas pekerja yang ada didalam ruangan. Lampu didalam ruangan hanya akan menyala bila intensitas cahaya kurang dan ada aktivitas pekerja, bila kedua kondisi itu tidak terpenuhi maka lampu didalam ruangan akan mati. Bel akan berbunyi dan LCD akan menampilkan karakter pada waktu yang telah ditentukan yaitu pada pukul 08.00 (selamat bekerja), 12.00 (selamat istirahat) dan 17.00 (selamat pulang). Lampu teras akan menyala otomatis pada pukul 17.15 dan akan mati pada pukul 06.00. Semua sistem tersebut akan bekerja secara otomatis.
Kesimpulan dari pembuatan tugas akhir ini adalah (1) dalam perancangan otomatisasi penyalaan lampu dan bel pada industri rokok agar dapat bekerja secara efektif dan efisien adalah (a) menentukan sistem kerja alat yang akan dibuat, (b) menentukan input dan, (c) menentukan output yang diinginkan. (2) Dalam pembuatan sistem otomatisasi penyalaan lampu dan bel pada industri rokok agar dapat bekerja sesuai dengan yang diharapkan adalah (a) menentukan komponen yang akan dipakai , (b) membuat skema rangkaian, (c) membuat PCB (Printed Circuit Board), (d) melakukan pengeboran PCB dan (e) penyolderan komponen. (3) Pengujian sistem kontrol penyalaan lampu dan bel otomatis pada industri rokok dilakukan berdasarkan perbandingan antara hasil perhitungan teori dan pengukuran. Hasil perbandingan menunjukkan sistem yang telah dibuat dapat bekerja dan hasilnya mendekati kesamaan antara teori dengan pengukuran.
Safi’i, Achmad. 2010. Otomatisasi Penyalaan Lampu dan Bel Pada Industri Rokok Berbasis Mikrokontroler. Tugas Akhir, Jurusan Teknik Elektro Fakultas Teknik Universitas Negeri Malang. Pembimbing: (I) Drs. Puger Honggowiyono, M.T. dan (II) I Made Wirawan, S.T., S.S.T.,
Kata kunci: otomatisasi, penyalaan, lampu dan bel, industri
Industri adalah suatu tempat yang digunakan oleh perusahaan untuk memproduksi barang. Salah satu faktor penting dari lingkungan industri adalah dapat memberikan kenyamanan kepada pegawai dalam beraktivitas. Untuk itu dapat diatasi dengan adanya sistem penerangan yang baik. ”Penerangan yang baik dalam suatu pabrik atau perusahaan akan membantu terciptanya suatu tempat kerja yang aman dan nyaman, sehingga dalam melaksanakan kegiatan produksi dapat menghemat penglihatan, tenaga, serta memberikan semangat kerja yang tinggi pada pegawai” (Rawan, 2009).
Tujuan pembuatan Tugas Akhir ini untuk menciptakan suatu sistem otomatisasi penyalaan lampu dan bel untuk menggantikan sistem manual pada industri rokok sehingga dengan adanya alat ini membantu pekerja dan perusahaan agar lebih efektif dan efisien dalam melakukan kegiatan produksi.
Metode perancangan meliputi: (1) perancangan perangkat keras (hardware) meliputi rangkaian sensor cahaya, sensor PIR, rangkaian minimum sistem, dan rangkaian driver, (2) perancangan perangkat lunak (software), (3) perancangan mekanik.
Hasil yang didapat adalah penyalaan lampu berdasarkan intensitas cahaya dan aktivitas pekerja yang ada didalam ruangan. Lampu didalam ruangan hanya akan menyala bila intensitas cahaya kurang dan ada aktivitas pekerja, bila kedua kondisi itu tidak terpenuhi maka lampu didalam ruangan akan mati. Bel akan berbunyi dan LCD akan menampilkan karakter pada waktu yang telah ditentukan yaitu pada pukul 08.00 (selamat bekerja), 12.00 (selamat istirahat) dan 17.00 (selamat pulang). Lampu teras akan menyala otomatis pada pukul 17.15 dan akan mati pada pukul 06.00. Semua sistem tersebut akan bekerja secara otomatis.
Kesimpulan dari pembuatan tugas akhir ini adalah (1) dalam perancangan otomatisasi penyalaan lampu dan bel pada industri rokok agar dapat bekerja secara efektif dan efisien adalah (a) menentukan sistem kerja alat yang akan dibuat, (b) menentukan input dan, (c) menentukan output yang diinginkan. (2) Dalam pembuatan sistem otomatisasi penyalaan lampu dan bel pada industri rokok agar dapat bekerja sesuai dengan yang diharapkan adalah (a) menentukan komponen yang akan dipakai , (b) membuat skema rangkaian, (c) membuat PCB (Printed Circuit Board), (d) melakukan pengeboran PCB dan (e) penyolderan komponen. (3) Pengujian sistem kontrol penyalaan lampu dan bel otomatis pada industri rokok dilakukan berdasarkan perbandingan antara hasil perhitungan teori dan pengukuran. Hasil perbandingan menunjukkan sistem yang telah dibuat dapat bekerja dan hasilnya mendekati kesamaan antara teori dengan pengukuran.
Langganan:
Komentar (Atom)